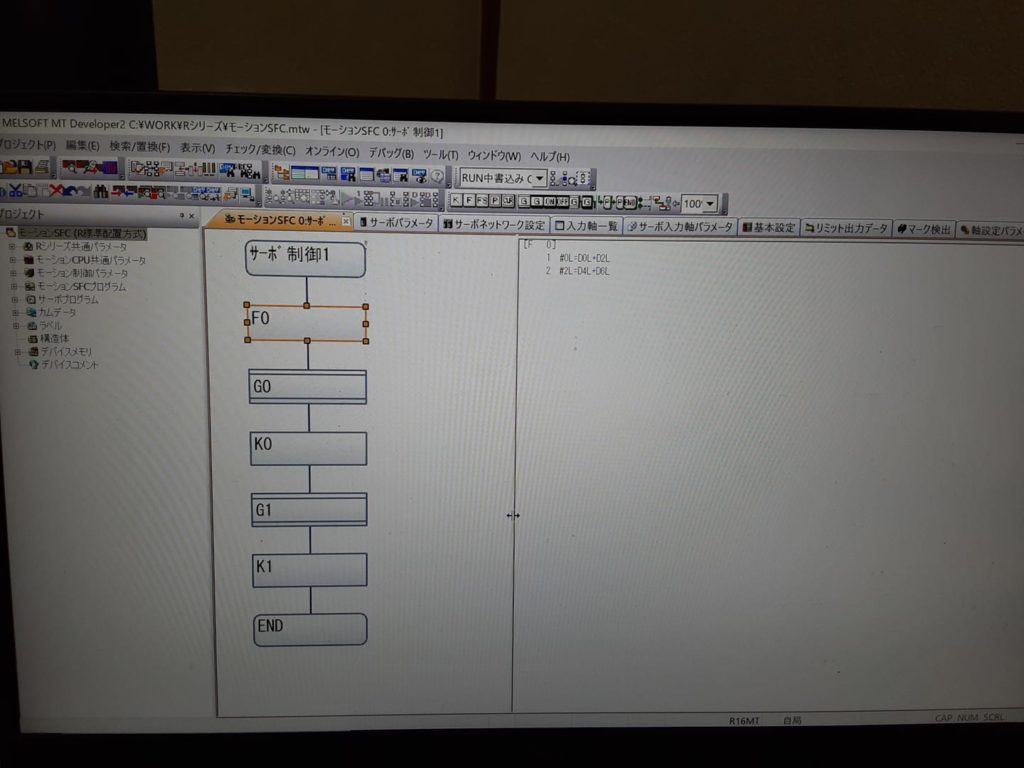
三菱モーションSFCは、MT Developer2で作成する。
F箱(算術演算、I/O制御)、G箱(移行条件判定)、 K箱(モーション制御) を並べるだけ。
電気制御設計・施工とシステムの調和
三菱モーションSFCは、MT Developer2で作成する。
F箱(算術演算、I/O制御)、G箱(移行条件判定)、 K箱(モーション制御) を並べるだけ。
もはやサーボだけでなくIAI・オリエンタルモーターの制御も多くなってきた。
それだけIAI・オリエンタルモーターが産業機械にとって当たり前に使われる。

ECADはやはり電気図面を書くときには大変効率がよくすばらしい。
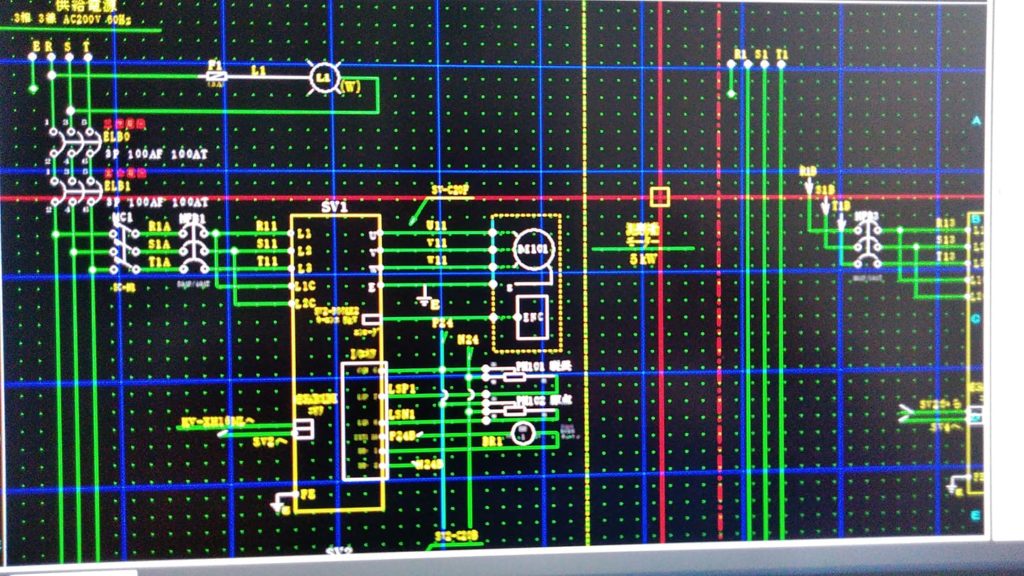
筆者TakuChanはハード設計から電気工事設計、電気工事指示、配線工事・制御盤改造も行っている。幾度となくソフト試運転時にハード改造も行ってきた。そして電気図面も修正。
ソフト試運転は工程の最後になるため、ハードの不備、工事の不備、工事の仕様変更も全てお客様から一人で受けないといけない。(これは案件の最後まで立ち会わないと知らない世界。)
簡単な配線改造は、一人でソフト改造と同時に行えるので工事屋を別に呼ぶ必要はないのが強み。
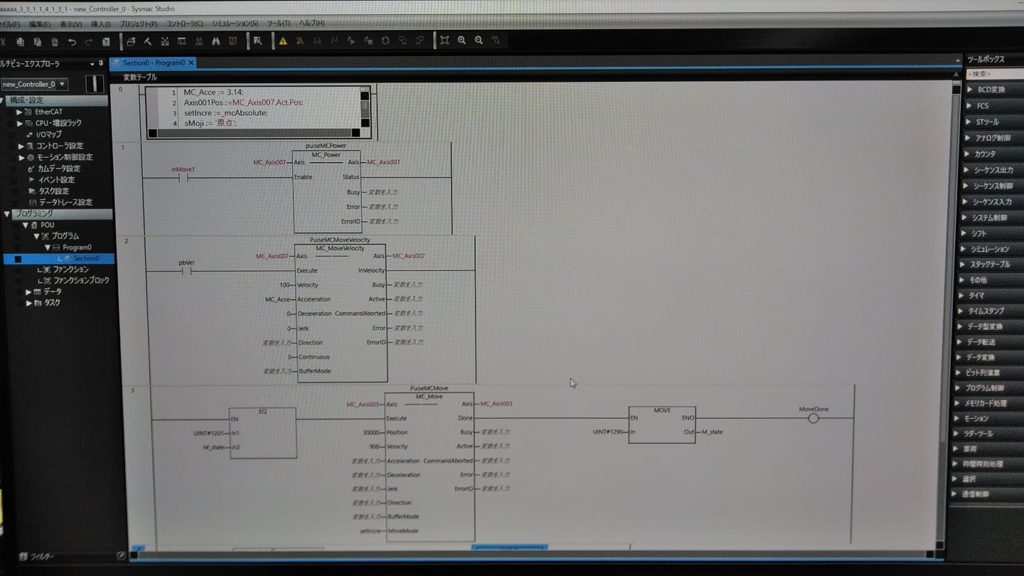
オムロンSysmacStudioはファンクションブロックとST言語とラダーを組み合わせたPLCOpenに対応したプログラムが可能。
例えばサーボはMC_Moveで位置決めができる。三菱GX Works3でも可能。
世界標準であり、シーメンス等ヨーロッパのPLCではデファクトスタンダードである。
これに慣れれば世界舞台で戦える電気制御技術者になれる。
既に筆者TakuChanは三菱・キーエンスPLCのシェアが強いアジア各国で電気制御の仕事をしてきた。
オムロンNX102でST言語。ST言語は三菱PLCと共通。
キーエンスPLCのKVスクリプトはVBとほぼ同じ文法だがST言語は違う。Pascalに近いが全然違う部分もある。慣れれば同じだけど。
モーションCPUの使い方。 ※以下、ネットやマニュアルからのメモ書き(備忘録)。 DP.SFCS H3E1 K10 ・モーションSFCプログラム起動要求命令 DP.SVST H3E1 "J1" K0 ・モーションSFCプログラムなしでサーボプログラムKを 呼ぶことができる ”J1”というのは1軸のサーボプログラムK0(SFCでのK箱)を実行。 ※ちなみにH3E1というのは、マルチCPUで使うパラメータで ・H3E0:CPUスロット(メインCPU) ・H3E1:スロット0(マルチCPU1号機) ・H3E2:スロット1(マルチCPU2号機) モーションSFC F箱(算術演算、I/O制御)、G箱(移行条件判定)、 K箱(モーション制御) を並べるだけ。 DP.SFCS H3E1 K20 M0 D0 ・立ち上がり実行 完了デバイス付き 完了デバイスを指定した場合、 受付完了でM0が1スキャンONし、 異常完了の場合はM1もONになる。 D0には完了ステータスが書き込まれる。 S.TO命令で位置決めアドレスをシーケンサCPUの 共有メモリに書く。 SP.TO H3E1 H800 D0 K10 M0 ※CPU共有メモリの800H番地にD0から10点分コピー S.TO完了後(M0立ち上がりで分かる)SP.SFCSで位置決め用SFC起動。 モーションSFCのF箱でMULTR命令を使ってS.TOで かかれたデータをモーションコントローラの デバイスにコピーしてからサーボプログラム始動。
https://www.mitsubishielectric.co.jp/.../motio.../point.html
CCLINK-IEでサーボ制御するMR-J4GF。 LANケーブルで配線できるし、 QD77GFやRD77GFは他のCCLINK-IE機器もつなげるので、 ハード的には便利だが、 SSCNETに比べサーボパラメータの変更が GX-WORKSからできないので不便。
