オムロンでよく使うサーボアンプはR88D-KN20H-ECTといったEthercat G5シリーズだ。
今回はCJ2HのCJ1W-NC482でのサーボ制御を紹介する。
なお、サーボの同期制御はCJ2HのCJ1W-NC482でしかできない。※CJ1W-NC481ではサーボ制御はできるが、同期制御はできない。
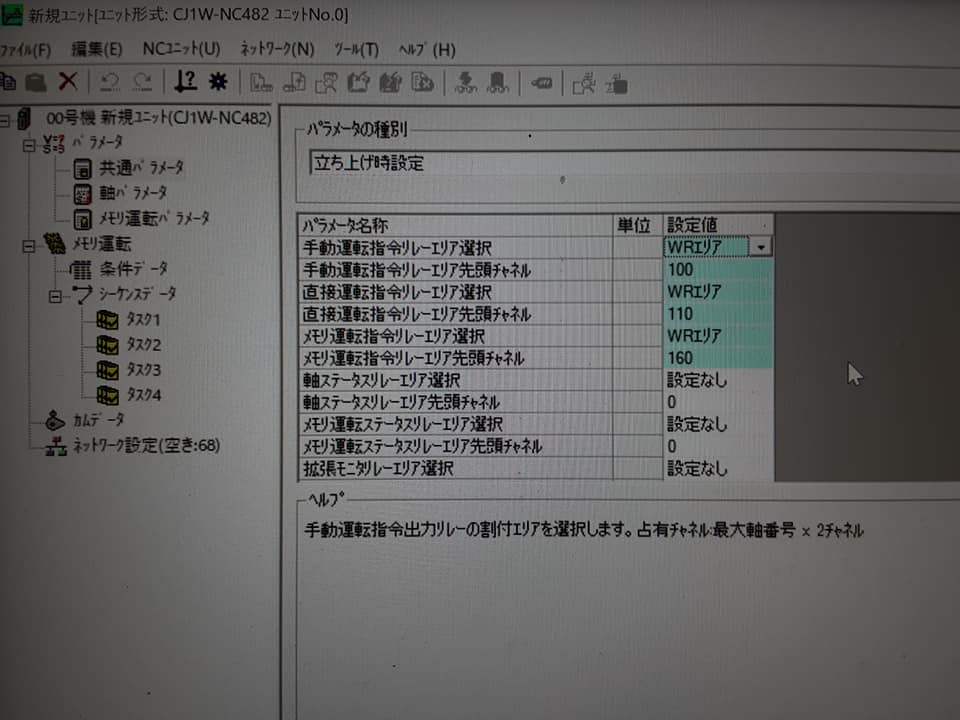
三菱やキーエンスPLCと違い、オムロンPLCはバッファアドレスでサーボ制御をするのではなく、Wデバイスのチャンネル番号を指定することにより、制御するリレーやメモリが割り当てられる。またユニットのチャンネルのIOデバイスも使う。
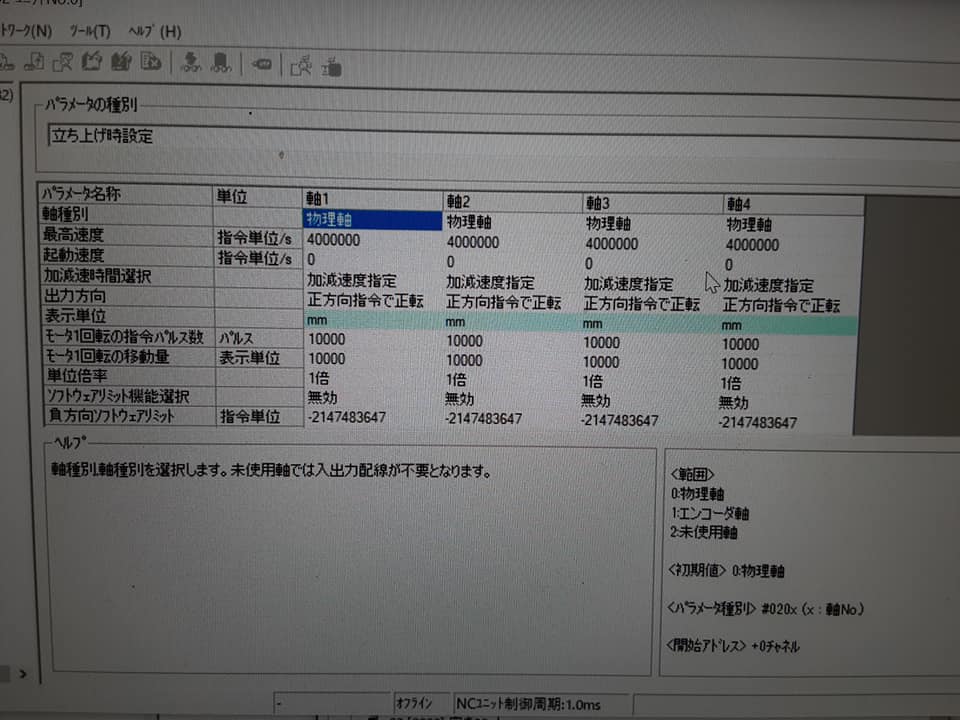
サーボの制御パラメータ設定は、三菱やキーエンスPLCとほぼ同じだ。位置や速度をWデバイスにXFER(=三菱やキーエンスでいうBMOV)して、位置決め開始リレーをONする。
位置決めユニット設定(CX-ProgrammerのIOテーブルでCJ1W-NC482をダブルクリック)「ファイル」→「変数テーブル作成」で制御するデバイスを確認できる
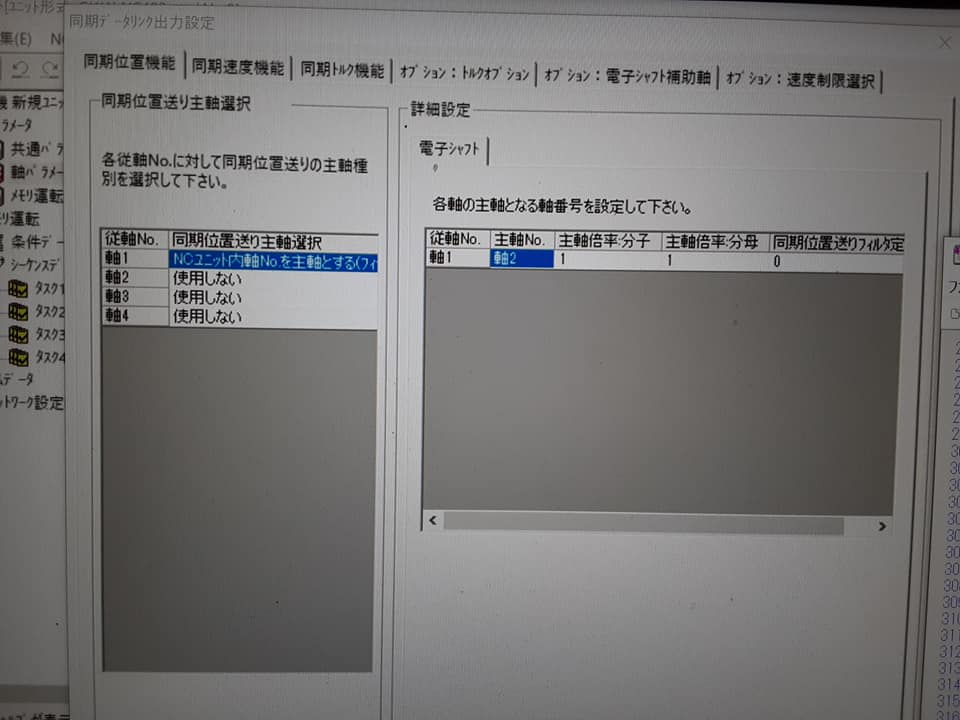
同期の主軸・ギア比設定は メニューの「NCユニット」→「関連パラメータ設定」→「同期送り」 「出力設定」ボタン押下 →主軸・ギア比設定できる。これは三菱やキーエンスの同期パラメータ設定と似ている。
今回の場合だと同期制御するにはW110.8をONする。
同期位置送り指令対象のサーボ軸(従軸)の直接運転指令リレーエリアの[同期位置送りリレーW110.8]がON している間、主軸に同期して動作する。軸ステータスリレーエリアの[同期位置送り受付W181.8]がON したら、同期位置送り指令を受け付ける状態になっている。
なお、オムロンNXではEthercat標準装備されているので、特殊ユニットを経由せず、直接LANケーブルで通信できる。すげー。
オムロンNXはPLCOpenのMC_Moveで制御することになる。