サーボ同期するとき、従軸が直線動作するのではなく、機械カムのように複雑な動きをさせたいときサーボ設定で簡単にできる。(これを電子カムという。)
今回も三菱モーションRD78G4で紹介する。(なお三菱シンプルモーションやキーエンスでは設定の仕方が異なる。また別記事で紹介する。)
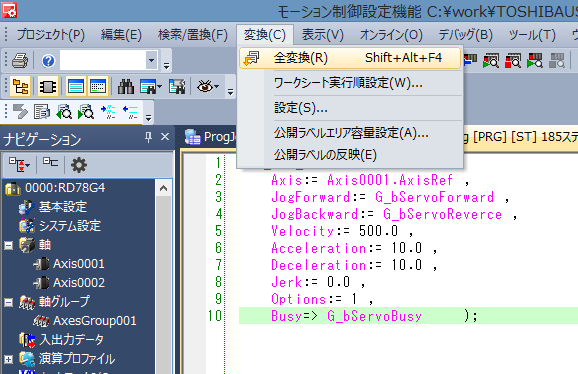
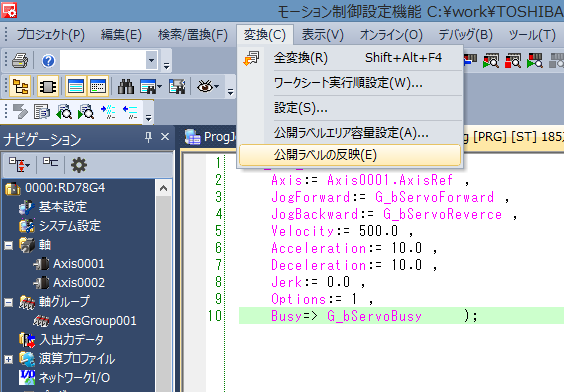
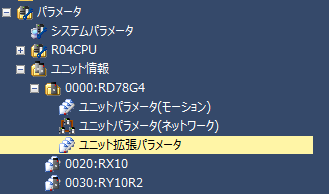
まずRD78G4のユニット拡張パラメータをクリックしてモーション制御設定機能画面を立ち上げる。(※前々回ブログ記事を参照。)
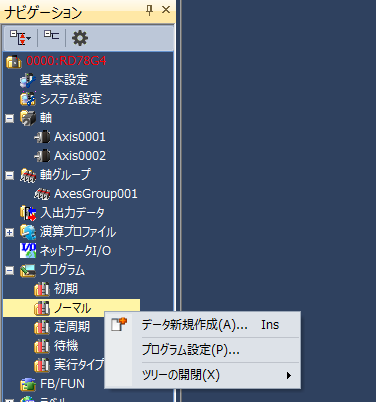
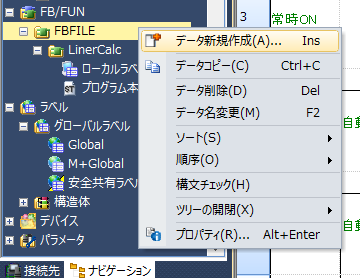
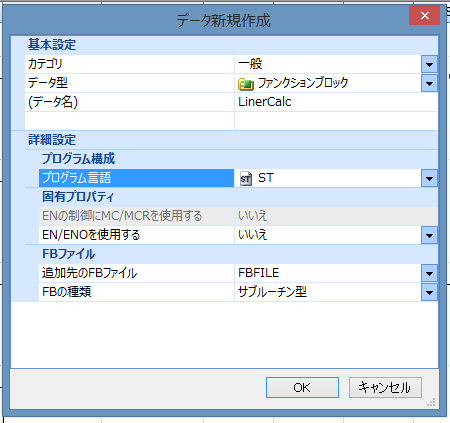
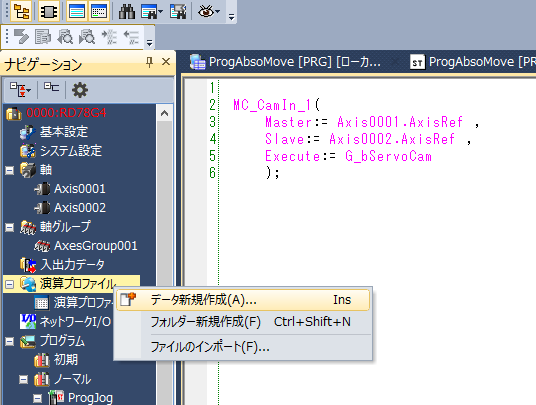
そして演算プロファイルで「データ新規作成」を行う。
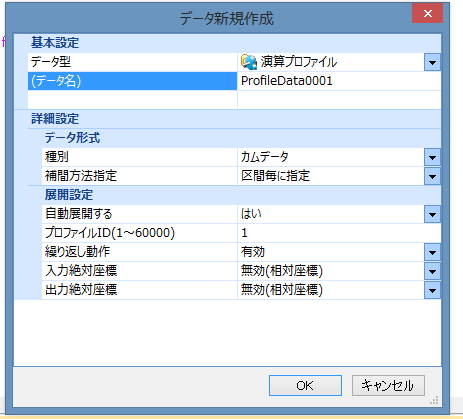
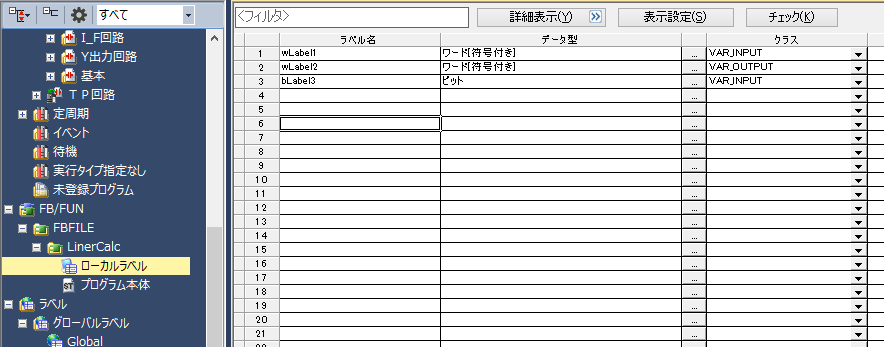
そして以下画面が立ち上がるので、ここでカムデータを作る。1サイクル長とストロークを設定して、ストローク設定にデータを入れる。
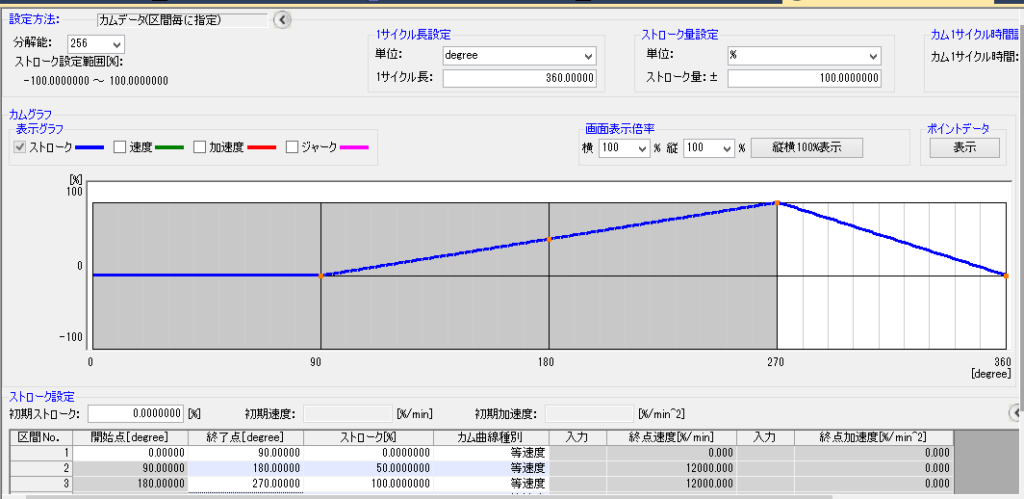
ここでカムデータを作るコツなのだが、当たり前だが、ずっと繰り返し可能なカムデータを作らないとうまくいかない。主軸とずれたりおかしな動きになってしまう。必ず動きの周期がうまくいくよう考えて作成する。
※実際の機械のインターロックに気を付けて作成してください。本サイトは動作を保証するものではありません。各自責任で参考にしてください。
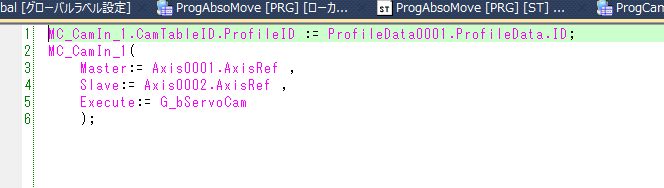
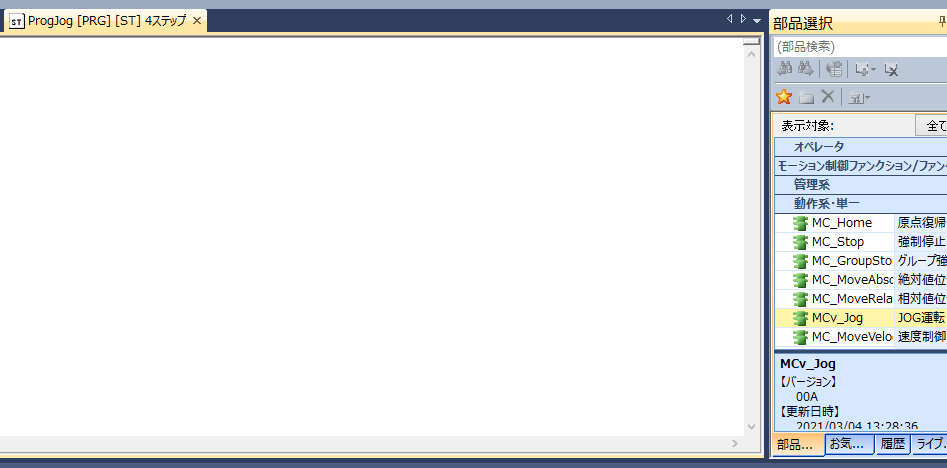
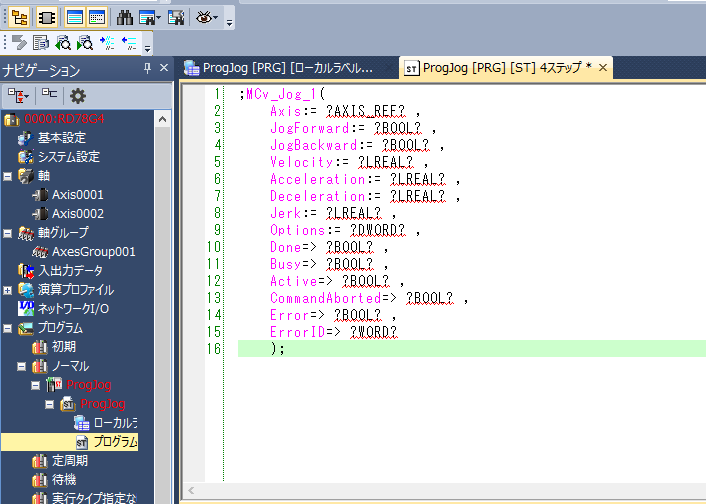
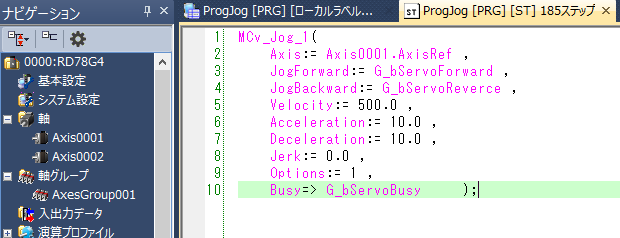
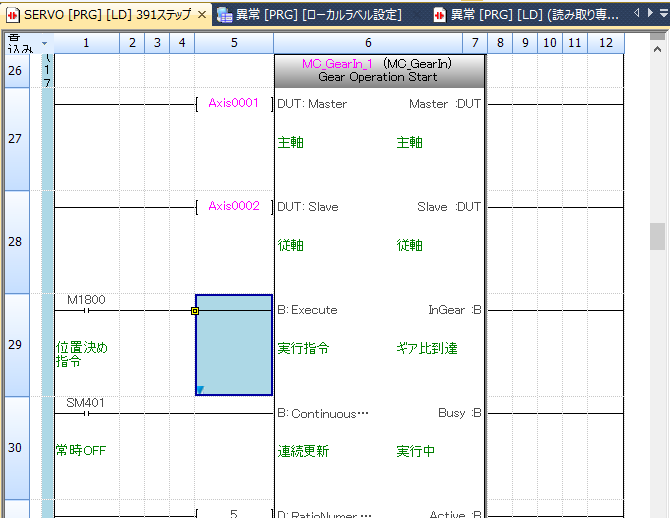
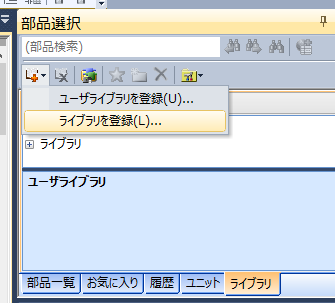
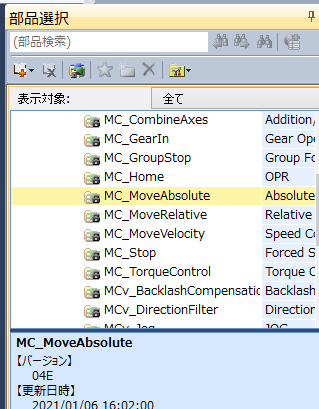
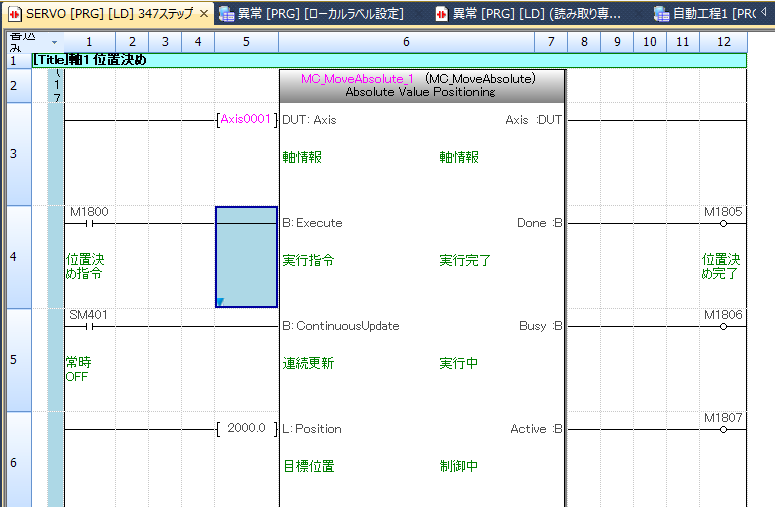
後はPlcopen関数 MC_CamInのCamTableID.ProfileIDに先ほど作成した演算プロファイルを代入すれば紐づけ完了。